Adjusted-ECOM
In the middle of the Loop
Adjusted-ECOM – An in-the-loop measurement model used for highly automated road vehicles
Summary
Methods for how to keep the driver in-the-loop in highly automated vehicles is a research area that gets more and more attention while cars, trucks etc. are evolving to more complex vehicles that can operate on a higher level of automation. However a generally accepted and used measuring and validating method to determine whether a driver is in- or out-of-the-loop is not developed yet. The purpose of this thesis was to propose a theoretical model, with the aim to provide a structured way to test and analyse in-the-loop concepts. This model is called Adjusted-ECOM.
The Adjusted-ECOM is built upon the original Extended Control Model and uses the same structure of four concurrent control layers that divides the strategic and dynamic driving tasks. The Adjusted-ECOM is adapted to a Driver-Vehicle System where the tasks of the control layers can be shared between two entities within the system. The model does this by claiming the Driver-Vehicle System functions as a heterogeneous Multi-agent system where two agents, the human and the automation-system collaborate to achieve common goals and individual tasks. The SAE International’s new standard J3016, which is also used in the Adjusted-ECOM, determines which driving-tasks are assigned to the agents in the different levels of automation. The Adjusted-ECOM indicates which inputs and outputs the different driving-tasks have. If an agent cannot provide inputs to the driving-tasks that agent, and consequently the whole Driver-Vehicle System, is out-of-the-loop. The approach to divide the Extended Control Model´s control-layers between levels of automation with help of the theory of Multi-agent system is not unique and it has been tested before. But it has not been adapted to road vehicles neither to their levels of automation. This is what the Adjusted-ECOM tries to achieve.
The benefits of the Adjusted-ECOM have been proven with help of a truck simulator study where the participants were professional truck drivers. The Adjusted-ECOM was able to specify when and why the participants were out-of-the-loop by referring to the specific tasks according to the Adjusted-ECOMs different control layers.
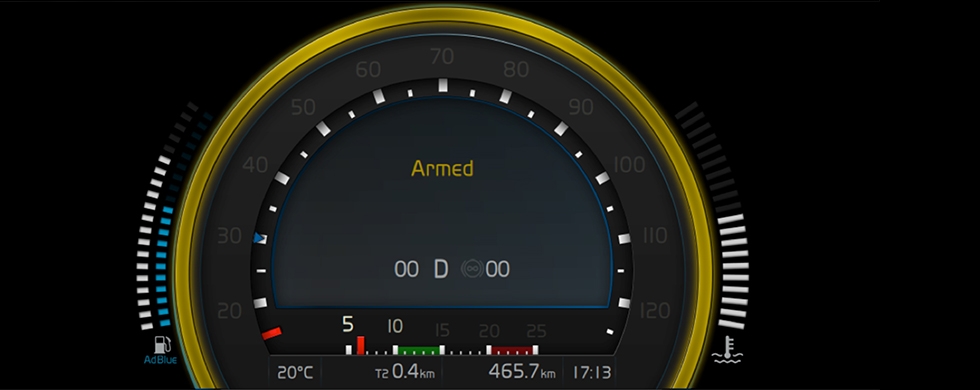
The thesis work also reveals a concept function, called the Armed State which provides a safer and easier way of transition between different levels of automation. It does this by helping the Driver-Vehicle System to stay in-the-loop in the higher control-layers of the Adjusted-ECOM. The concept alters the relation between human and machine by changing the activation point of the automation system. According to a pre-set value the Armed State either can inform the driver about a possible transition or initiate the transition itself, depending on the Armed State function uses the automated or manual switching feature. The effect and usefulness of the concept and its features can be seen in all types of traffic situation but the Armed State is more aiding in dense traffic, for instance driving in queue, than driving on an empty highway. The benefits of the Armed State are more safety oriented and don´t provide a significant improvement in fuel consumption or financial benefits.
Skriv ut ![]()